|
Робот мог бы построить гигантский телескоп в космосе
|
|
|
|
Космический телескоп "Хаббл" был доставлен в космос на борту космического челнока "Дискавери", а затем выведен на низкую околоземную орбиту. Космический телескоп Джеймса Уэбба был установлен в носовой части ракеты "Ариан-5", а затем запущен. Она развернула свое зеркало и затенитель на пути к месту назначения в точке Лагранжа Солнце-Земля L2.
|
|
|
|
Однако МКС была собрана в космосе, а компоненты были запущены в разное время. Может ли это быть моделью для создания будущих космических телескопов и других космических объектов?
|
|
|
|
Во Вселенной много темных уголков, в которые нужно заглянуть. Вот почему мы стремимся создавать более мощные телескопы, а значит, и зеркала большего размера. Однако запускать их в космос внутри носовых частей ракет становится все труднее. Поскольку у нас больше нет космических челноков, это приводит нас к естественному выводу: собирать наши космические телескопы в космосе нужно с помощью мощных роботов.
|
|
|
|
В новом исследовании, опубликованном в журнале Acta Astronautica, рассматривается возможность использования шагающих роботов для создания космических телескопов.
|
|
|
|
Исследование называется "Новая эра шагающих манипуляторов в космосе: технико-экономическая обоснованность и эксплуатационная оценка установки космического телескопа с большой апертурой длиной 25 м на орбите". Ведущий автор - Ману Наир из Линкольнского центра автономных систем в Великобритании.
|
|
|
|
|
|
|
"Это исследование является своевременным, учитывая постоянный спрос на астрономию высокого разрешения и наблюдения Земли в космическом сообществе, и служит основой для будущих миссий с телескопами гораздо большей апертуры, миссий, требующих сборки космических станций, и спутников, вырабатывающих солнечную энергию, - вот лишь некоторые из них", - пишут авторы.
|
|
|
|
Несмотря на то, что канадская и европейская роботизированные руки на МКС доказали свою работоспособность и эффективность, у них есть ограничения. Они управляются астронавтами дистанционно и имеют ограниченные возможности при ходьбе.
|
|
|
|
Осознавая потребность в более мощных космических телескопах, космических станциях и другой инфраструктуре, Наир и его соавторы разрабатывают концепцию усовершенствованного шагающего робота. "Чтобы устранить ограничения обычных шагающих манипуляторов, в этой статье представлен новый подвижный шагающий робот с семью степенями свободы (E-Walker) для будущих миссий по сборке и производству в космосе (ISAM)", - пишут они.
|
|
|
|
Робототехника, автоматизация и автономные системы (RAAS) будут играть большую роль в будущем космических телескопов и другой инфраструктуры. Эти системы требуют гибкости, высокой степени автономии, резервирования и модульности. Предстоит проделать большую работу по созданию RAAS, которые могут работать в суровых условиях космоса. Концепция E-Walker направлена на выполнение некоторых из этих требований.
|
|
|
|
Авторы указывают на то, как роботы используются в уникальных промышленных условиях здесь, на Земле. Объединенный европейский Torus выводится из эксплуатации, и для проверки его эффективности используется четвероногий робот Boston Dynamics Spot. В течение 35-дневных испытаний он автономно перемещался по самолету, составляя карту объекта и снимая показания датчиков, избегая препятствий и персонала.
|
|
|
|
Использование Spot во время промышленной остановки показывает потенциал автономных роботов. Однако роботам еще предстоит пройти долгий путь, прежде чем они смогут построить космический телескоп. Исследование авторов может стать важным начальным шагом.
|
|
|
|
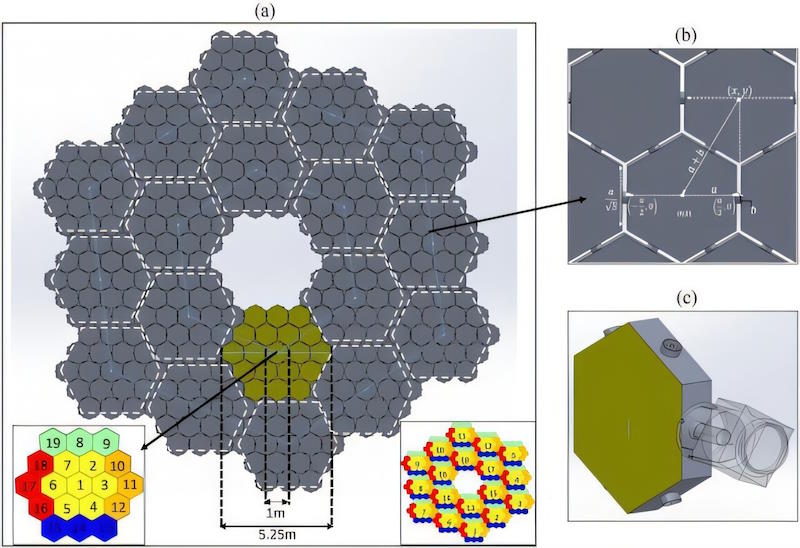
Их примером является гипотетический космический телескоп LAST с большой апертурой и широкоугольным 25-метровым главным зеркалом, работающий в видимом свете. LAST является основой для технико-экономического обоснования исследователей.
|
|
|
|
Основное зеркало LAST будет модульным, и его часть будет иметь разъемы и интерфейсы для сборки, а также для передачи данных, питания и тепла. Такая модульность облегчит сборку телескопа автономными системами.
|
|
|
|
LAST будет собирать свое зеркало, используя блоки первичных зеркал (PMU). Девятнадцать PMU составляют сегмент основного зеркала (PMS), а 18 PMSS будут составлять 25-метровое основное зеркало LAST. Для завершения сборки телескопа потребуется в общей сложности 342 PMU.
|
|
|
|
Концепция E-Walker также будет включать в себя два космических аппарата: базовый космический аппарат (BSC) и космический аппарат-хранилище (SSC). BSC будет действовать как своего рода головной корабль, отправляя необходимые команды на E-Walker, отслеживая его рабочее состояние и обеспечивая бесперебойную работу. SSC будет хранить все PMU в сложенном виде, а E-Walker будет извлекать их по одному за раз.
|
|
|
|
Для ПОСЛЕДНЕЙ миссии исследователи разработали 11 различных концепций операций (CONOP). Некоторые из CONOP включали в себя несколько электронных ходунков, работающих сообща. Цель состоит в том, чтобы оптимизировать распределение задач, определить приоритетность массы, поднимаемой с земли, и упростить управление и планирование движения. "Вышеупомянутые одиннадцать сценариев полета изучаются дополнительно, чтобы выбрать наиболее приемлемый вариант для сборки 25-метрового ПОСЛЕДНЕГО", - поясняют они.
|
|
|
|
Передовые инструменты, такие как робототехника и искусственный интеллект, станут основой будущих космических исследований. Почти невозможно представить будущее, в котором они не будут иметь решающего значения, особенно по мере того, как наши цели становятся все более сложными.
|
|
|
|
"Возможность собирать сложные системы на орбите с помощью одного или нескольких роботов станет абсолютным требованием для поддержки устойчивой орбитальной экосистемы будущего", - пишут авторы. "В ближайшие десятилетия на околоземных орбитах потребуется новая инфраструктура, которая будет намного более совершенной, чем Международная космическая станция, для обслуживания на орбите, производства, переработки отходов, орбитальных складов, космической солнечной энергетики (SBSP), а также астрономических станций и станций наблюдения за Землей".
|
|
|
|
Авторы отмечают, что их работа основана на некоторых предположениях и теоретических моделях. Концепция E-walker по-прежнему нуждается в доработке, но прототип уже разрабатывается.
|
|
|
|
Вполне вероятно, что E-walker или какая-либо подобная система в конечном итоге будет использоваться для создания телескопов, космических станций и другой инфраструктуры.
|
|
|
|
Источник
|







