|
Роботы-трансформеры помогут в космостроительстве
|
|
|
|
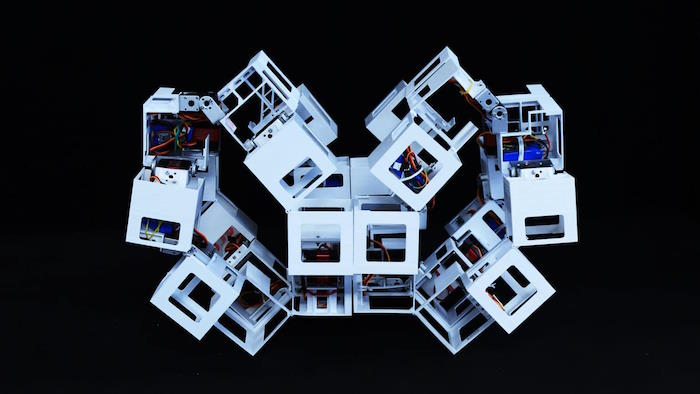
Вдохновленные искусством складывания бумаги оригами, инженеры Университета штата Северная Каролина нашли способ превращать одну пластиковую конструкцию в форме куба в более чем 1000 конфигураций, используя всего три активных двигателя. Полученные результаты могут проложить путь к созданию изменяющих форму искусственных систем, которые могут выполнять множество функций и даже нести нагрузку, как, например, универсальные роботизированные конструкции, используемые в космосе.
|
|
|
|
“Вопрос, который мы задаем, заключается в том, как добиться множества универсальных форм с наименьшим количеством приводов, приводящих в действие механизм изменения формы”, - сказал Цзе Инь, доцент кафедры машиностроения и аэрокосмической инженерии и соавтор статьи, описывающей эту работу. “Здесь мы используем иерархическую концепцию, наблюдаемую в природе, – как слоистые мышечные волокна, – но с пластиковыми кубиками для создания робота-трансформера”.
|
|
|
|
Исследователи из штата Северная Каролина собрали полые пластиковые кубики с помощью 3D-принтера и соединили 36 из них с вращающимися шарнирами; некоторые шарниры были закреплены металлическими штифтами, в то время как другие приводились в действие по беспроводной сети с помощью двигателя.
|
|
|
|
Исследователи смогли придать кубам более 1000 форм, используя всего три активных двигателя. Эти формы включали конструкции, похожие на туннели, мосты и даже многоэтажные здания.
|
|
|
Непривязанные роботы–трансформеры могут двигаться вперед, назад и в стороны – без помощи ног - просто управляя изменением формы конструкции. Кроме того, роботы могут относительно быстро трансформироваться из плоских или полностью открытых в похожие на коробки кубики большего размера или полностью закрытые. Роботы также могут переносить нагрузку, примерно в три раза превышающую их собственный вес.
|
|
|
|
Далее исследователи попытаются сделать роботов-трансформеров еще лучше.
|
|
|
|
“Мы хотим создать более прочную конструкцию, способную выдерживать большие нагрузки”, - сказал Янбин Ли, научный сотрудник университета Северной Каролины и соавтор статьи. “Если нам нужна, например, форма автомобиля, как нам спроектировать первую конструкцию, которая может трансформироваться в форму автомобиля? Мы также хотим протестировать наши конструкции в реальных приложениях, таких как космические роботы”.
|
|
|
|
“Мы считаем, что они могут быть использованы в качестве развертываемых, конфигурируемых космических роботов и мест обитания”, - сказал Антонио Ди Лалло, научный сотрудник штата Северная Каролина и соавтор статьи. “Он модульный, поэтому вы можете отправить его в космос и собрать в качестве убежища или среды обитания, а затем разобрать”.
|
|
|
|
“Для пользователей он должен быть простым в сборке и управлении”, - сказал Инь.
|
|
|
|
Хао Су, доцент кафедры машиностроения и аэрокосмической инженерии, является соавтором статьи. Цзюньси Чжу, аспирант университета Северной Каролины, и Инь Чи, бывший аспирант университета Северной Каролины, также являются соавторами статьи.
|
|
|
|
Результаты опубликованы в Nature Communications. Финансирование исследования было предоставлено Национальным научным фондом в рамках грантов CMMI-2005374, CMMI-2126072 и 2231419.
|
|
|
|
Возможности изменения формы имеют решающее значение для обеспечения многофункциональности как биологических, так и искусственных систем. Были предложены различные стратегии изменения формы для применения в метаматериалах и робототехнике. Однако лишь немногие из этих подходов позволяют легко трансформироваться во множество объемных форм после изготовления с использованием относительно простого механизма приведения в действие и управления. Черпая вдохновение из плотного оригами и иерархий в природе, мы представляем новый метод иерархического построения, основанный на многогранниках, для создания обширной библиотеки компактных метаструктур оригами. Мы показываем, что единая иерархическая структура оригами может автономно адаптироваться к более чем 1000 универсальным архитектурным конфигурациям, что достигается за счет использования менее 3 степеней свободы приведения в действие и простой кинематики перехода.
|
|
|
|
Мы раскрываем фундаментальные принципы, управляющие этим преобразованием формы, с помощью теоретических моделей. Кроме того, мы также демонстрируем широкий спектр потенциальных применений этих трансформируемых иерархических структур. К ним относятся их использование в качестве неуправляемых и автономных роботов-трансформеров, способных к различной смене походки и разнонаправленному передвижению, а также быстро развертываемая и самонаполняемая архитектура, демонстрирующая масштабируемость вплоть до метрового масштаба. Наконец, мы представляем концепцию многозадачных реконфигурируемых и развертываемых космических роботов и сред обитания, демонстрирующих адаптивность и универсальность этих метаструктур.
|
|
|
|
Источник
|







