В настоящее время разрабатываются различные виды прыгающих роботов для использования в различных космических исследовательских миссиях. Мы сообщали об их использовании на астероидах и даже на нашей собственной Луне. Но исследование, финансируемое Институтом передовых концепций НАСА (NIAC) в 2018 году, запланировало миссию в мир, где прыжки могут быть не столь заметным преимуществом, — в Европу.
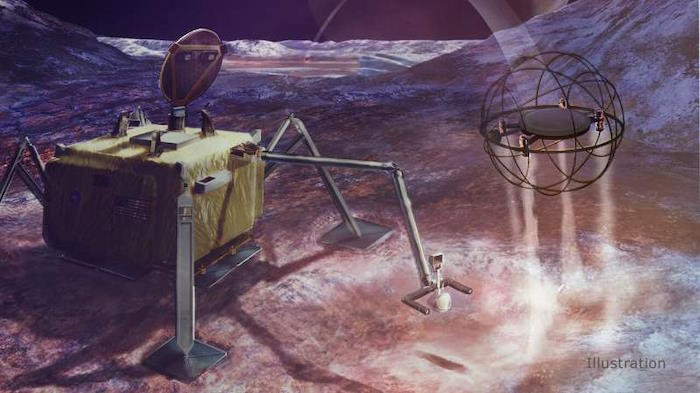
Миссия, разработанная инженерами Лаборатории реактивного движения НАСА, Университета Пердью и Honeybee Robotics, известна как автономный поисковый робот с паровым приводом для океанских миров, или SPARROW. Он имеет размер и форму футбольного мяча, а логика, питание и системы управления находятся внутри сферической внешней полой оболочки.
Однако SPARROW не сможет работать самостоятельно. Потребуется посадочный модуль, чтобы доставить его на поверхность и использовать в качестве базы для дозаправки и сбора образцов. "Европа Клипер", единственная запланированная на данный момент миссия НАСА на ледяную Луну, была бы хороша для поездки автостопом, но отсутствие посадочного модуля делало ее неподходящей для "СПАРРОУ".
Однако сам по себе прыгающий робот хорошо приспособлен к условиям Европы. Его разработчики намеревались сделать его "не зависящим от местности", что означает, что он сможет передвигаться даже по самой суровой местности, которую может создать ледяная луна. Это могут быть пенитенциарии - ледяные глыбы высотой в несколько метров, по которым наземным роботам будет трудно передвигаться.
SPARROW мог бы пролететь над ними, собрать интересные образцы и вернуться к посадочному модулю, чтобы заправиться и сдать их на хранение. Затем он мог бы снова отправиться в другом направлении. Чтобы смоделировать архитектуру этой системы, команда JPL провела первый этап, пытаясь определить наилучшую двигательную установку для робота и моделируя алгоритмы управления полетами.
Сначала давайте рассмотрим двигательную установку. Посадочный модуль, сопровождающий SPARROW, должен был добывать лед на поверхности Луны, затем нагревать его и хранить в виде воды. Когда SPARROW вернется из полета, он будет использовать воду для дозаправки.
В рамках исследования были рассмотрены пять различных методов приведения в движение. Тем не менее, лучшим оказался "двигатель с горячей водой", в котором SPARROW самостоятельно нагревал воду, подаваемую посадочным модулем, а затем выбрасывал ее с помощью реактивной силы, чтобы оторвать робота от поверхности.
Вторая важная часть работы была посвящена управлению этим двигателем. Коррекция траектории имеет решающее значение для успеха миссии, но в данном случае разработчики считают, что независимо от того, где окажется робот, он сможет собрать образец и вернуться на посадочный модуль. Это связано с его шарнирной конструкцией, которая позволяет роботу постоянно правильно ориентироваться, даже после того, как он некоторое время подпрыгивал на замерзшей поверхности.
Однако предстоит еще многое сделать, прежде чем миссия будет готова к запуску. Некоторые из наиболее актуальных вопросов заключаются в том, как предотвратить образование льда в двигательном сопле робота и по всей его конструкции. Такие завалы могут легко нарушить все существующие расчеты траектории и теоретически полностью обездвижить бункер, если они будут достаточно серьезными.
Однако на данный момент не планируется никаких работ по решению этих проблем, поскольку проект еще не получил финансирование на второй этап от NIAC, и работа над ним, похоже, застопорилась. Доктор Гарет Мейрион-Гриффит, главный исследователь проекта, перешел из JPL на работу в Collins Aerospace. Тем не менее, когда—нибудь идеи автора могут быть интегрированы в миссию посадочного модуля "Европа" - нам придется подождать и посмотреть.