|
Гонки на дронах готовят к работе в космосе
|
|
|
|
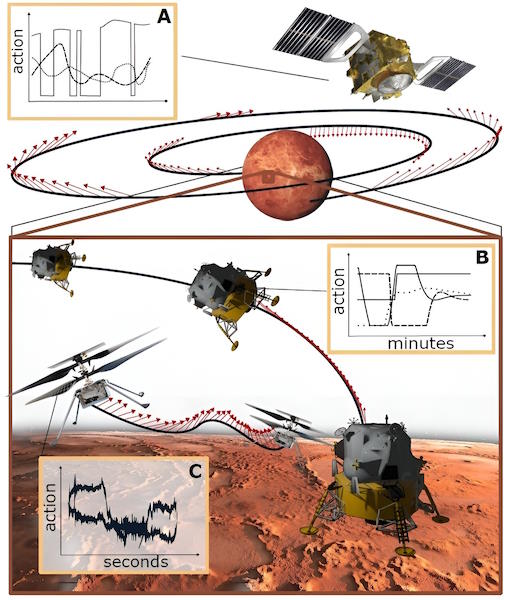
В "Кибер-зоопарке" Технологического университета Делфта проводятся гонки на дронах на время, чтобы проверить эффективность систем управления ИИ на основе нейронных сетей, которые планируется использовать для космических полетов следующего поколения. Исследование, проведенное командой передовых концепций ЕКА совместно с лабораторией микроавианосилищ MAVLab из Тюдельфта, подробно описано в последнем выпуске журнала Science Robotics. "Благодаря долгосрочному сотрудничеству мы изучали возможность использования обучаемых нейронных сетей для автономного контроля за всеми видами сложных маневров космических аппаратов, таких как межпланетные перелеты, приземления на поверхность и стыковки", - отмечает Дарио Иззо, научный координатор ACT ЕКА. "В космосе каждый бортовой ресурс должен использоваться максимально эффективно, включая топливо, доступную энергию, вычислительные ресурсы и, зачастую, время. Такой подход с использованием нейронных сетей может обеспечить оптимальную работу на борту, повысив автономность и надежность полета. Но нам нужен был способ протестировать это в реальном мире, прежде чем планировать реальные космические полеты.
|
|
|
|
"Именно тогда мы остановились на гонках на дронах как на идеальной спортивной площадке для тестирования сквозных нейронных архитектур на реальных роботизированных платформах, чтобы повысить уверенность в их будущем использовании в космосе". Дроны соревновались за лучшее время прохождения заданного курса в Кибер-зоопарке TU Delft, испытательном полигоне размером 10х10 м, который находится в ведении факультета аэрокосмической инженерии университета, партнера ЕКА в этом исследовании. Управляемые человеком квадрокоптеры "Micro Air Vehicle" были заменены автономными аналогами с нейронными сетями, обученными различным образом. "Традиционный способ проведения маневров космическим аппаратом заключается в том, что они детально планируются на земле, а затем загружаются на космический аппарат для проведения", - объясняет молодой выпускник ACT Себастьен Ориджер. "По сути, когда дело доходит до руководства полетом и контроля за ним, часть управления осуществляется на земле, в то время как часть управления осуществляется космическим аппаратом".
|
|
|
Однако космическая среда по своей сути непредсказуема и потенциально подвержена всевозможным непредвиденным факторам и помехам, таким как гравитационные колебания, атмосферная турбулентность или планетарные тела, форма которых отличается от формы, полученной при наземном моделировании. Всякий раз, когда космический аппарат по какой-либо причине отклоняется от запланированного маршрута, его система управления срабатывает, чтобы вернуть его к заданному профилю. Проблема в том, что такой подход может быть довольно дорогостоящим с точки зрения ресурсов, требуя целого набора корректировок методом грубой силы. Себастьен добавляет: "Наш альтернативный подход к созданию комплексных сетей наведения и управления, G&C Nets, включает в себя всю работу, выполняемую на космическом корабле. Вместо того чтобы придерживаться одного заданного курса, космический аппарат постоянно перестраивает свою оптимальную траекторию, начиная с текущего положения, в котором он находится, что оказывается гораздо более эффективным".
|
|
|
|
В компьютерном моделировании нейронные сети, состоящие из взаимосвязанных нейронов, имитирующие работу мозга животных, показали хорошие результаты при обучении с использованием "поведенческого клонирования", основанного на длительном ознакомлении с примерами экспертов. Но затем возник вопрос о том, как добиться доверия к этому подходу в реальном мире. В этот момент исследователи обратились к беспилотникам. "Между беспилотниками и космическими аппаратами существует довольно много синергетических связей, хотя динамика полета беспилотников намного быстрее и шумнее", - комментирует Дарио. "Когда дело доходит до гонок, очевидно, что главным дефицитным ресурсом является время, но мы можем использовать его в качестве замены других переменных, которым, возможно, придется уделять приоритетное внимание в космической миссии, таких как масса топлива. "Вспомогательные процессоры довольно ограничены, но наши G&CNET на удивление скромны, возможно, они хранят в памяти до 30 000 параметров, что может быть выполнено с использованием всего нескольких сотен килобайт, при этом задействовано менее 360 нейронов".
|
|
|
|
Чтобы обеспечить оптимальную работу, G&CNet должна иметь возможность отправлять команды непосредственно на исполнительные механизмы. Для космических аппаратов это двигатели малой тяги, а для беспилотных летательных аппаратов - их пропеллеры. "Главная проблема, с которой мы столкнулись при внедрении G&CNET в беспилотные летательные аппараты, - это несоответствие между приводами в симуляторе и в реальности", - говорит Кристоф Де Вагтер, главный исследователь из TU Delft. "Мы решаем эту проблему, выявляя разрыв в реальности во время полета и обучая нейронную сеть справляться с ним. Например, если пропеллеры дают меньшую тягу, чем ожидалось, беспилотник может заметить это с помощью своих акселерометров. Затем нейронная сеть восстановит команды, чтобы следовать новому оптимальному пути". "Существует целое научное сообщество, занимающееся гонками на дронах, и все сводится к победе в гонках", - говорит Себастьен. "В рамках нашего подхода G&CNets использование беспилотных летательных аппаратов представляет собой способ укрепить доверие, разработать прочную теоретическую базу и установить границы безопасности, прежде чем планировать демонстрацию реальных космических полетов".
|
|
|
|
Источник
|







