|
Микророботы могут совершить революцию в медицине
|
|
|
|
Микророботы могут совершить революцию в медицине. Исследователи из Центра обучающих систем Макса Планка ETH разработали метод визуализации, который впервые распознает микророботов размером с клетку индивидуально и с высоким разрешением в живом организме. Как удалить тромб из головного мозга без серьезного хирургического вмешательства? Как точно доставить лекарство в труднодоступный больной орган? Это всего лишь два примера бесчисленных инноваций, придуманных исследователями в области медицинской микроробототехники. Крошечные роботы обещают коренным образом изменить будущее медицинское лечение: однажды они смогут перемещаться по сосудам пациента, чтобы устранять злокачественные новообразования, бороться с инфекциями или предоставлять точную диагностическую информацию совершенно неинвазивно. В принципе, утверждают исследователи, кровеносная система может служить идеальным путем доставки для микророботов, поскольку она достигает всех органов и тканей тела.
|
|
|
|
Чтобы такие микророботы могли безопасно и надежно выполнять предполагаемые медицинские вмешательства, они не должны быть больше биологической клетки. У человека клетка имеет средний диаметр 25 микрометров — микрометр равен одной миллионной части метра. Самые маленькие кровеносные сосуды у человека, капилляры, еще тоньше: их средний диаметр составляет всего 8 микрометров. Микророботы должны быть соответственно маленькими, чтобы беспрепятственно проходить через мельчайшие кровеносные сосуды. Однако такой небольшой размер также делает их невидимыми для невооруженного глаза — и наука тоже еще не нашла технического решения для обнаружения и отслеживания роботов микронного размера по отдельности, когда они циркулируют в организме.
|
|
|
«Прежде чем этот будущий сценарий станет реальностью и микророботы действительно будут использоваться людьми, абсолютно необходима точная визуализация и отслеживание этих крошечных машин», — говорит Пол Вреде, научный сотрудник Центра систем обучения Макса Планка ETH (CLS). . «Без визуализации микроробототехника практически слепа», — добавляет Даниэль Разанский, профессор биомедицинской визуализации в ETH Zurich и Цюрихском университете и член CLS. «Таким образом, изображения с высоким разрешением в режиме реального времени необходимы для обнаружения и контроля микророботов размером с клетку в живом организме». Кроме того, визуализация также является необходимым условием для мониторинга терапевтических вмешательств, выполняемых роботами, и проверки того, что они выполнили свою задачу, как предполагалось. «Поэтому отсутствие возможности обеспечивать обратную связь в режиме реального времени с микророботами было серьезным препятствием на пути к клиническому применению».
|
|
|
|
Вместе с Метином Ситти, ведущим мировым экспертом в области микроробототехники, который также является членом CLS в качестве директора Института интеллектуальных систем им. Макса Планка (MPI-IS) и профессором физического интеллекта ETH, и другими исследователями, команда достигла важного результата. прорыв в эффективном объединении микроробототехники и обработки изображений. В исследовании, только что опубликованном в научном журнале Science Advances, им впервые удалось четко обнаружить и отследить крошечных роботов размером до пяти микрометров в реальном времени в сосудах головного мозга мышей с использованием неинвазивной техники визуализации. Исследователи использовали микророботов размером от 5 до 20 микрометров. Самые крошечные роботы размером с эритроцит, диаметром от 7 до 8 микрометров. Такой размер позволяет внутривенно введенным микророботам проходить даже через самые тонкие микрокапилляры в мозге мыши.
|
|
|
|
Исследователи также разработали специальную технологию оптоакустической томографии, чтобы фактически обнаруживать крошечных роботов одного за другим в высоком разрешении и в режиме реального времени. Этот уникальный метод визуализации позволяет обнаруживать крошечных роботов в глубоких и труднодоступных областях тела и мозга, что было бы невозможно с помощью оптической микроскопии или любого другого метода визуализации. Этот метод называется оптоакустическим, потому что свет сначала излучается и поглощается соответствующей тканью. Затем поглощение создает крошечные ультразвуковые волны, которые можно обнаружить и проанализировать, чтобы получить объемные изображения с высоким разрешением.
|
|
|
|
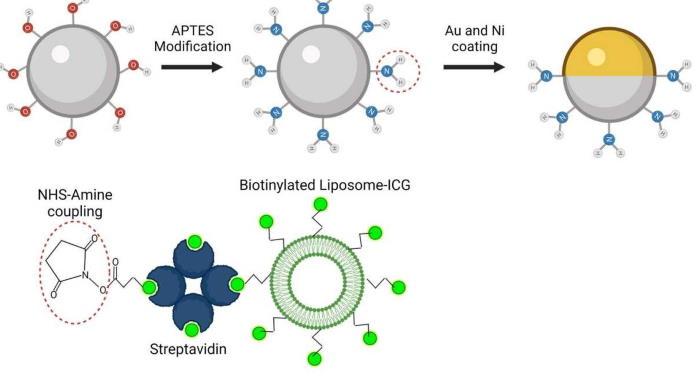
Чтобы сделать микророботов хорошо видимыми на изображениях, исследователям понадобился подходящий контрастный материал. Поэтому для своего исследования они использовали сферических микророботов на основе частиц кремнезема с так называемым покрытием типа Януса. Этот тип роботов имеет очень прочную конструкцию и очень хорошо подходит для сложных медицинских задач. Он назван в честь римского бога Януса, у которого было два лица. У роботов две половины сферы покрыты по-разному. В текущем исследовании исследователи покрыли одну половину робота никелем, а другую половину — золотом.
|
|
|
|
«Золото является очень хорошим контрастным веществом для оптоакустических изображений, — объясняет Разанский, — без золотого слоя сигнал, генерируемый микророботами, слишком слаб, чтобы его можно было обнаружить». В дополнение к золоту исследователи также проверили использование небольших пузырьков, называемых нанолипосомами, которые содержали флуоресцентный зеленый краситель, который также служил контрастным веществом. «Липосомы также имеют то преимущество, что вы можете нагружать их сильнодействующими лекарствами, что важно для будущих подходов к адресной доставке лекарств», — говорит Вреде, первый автор исследования. Потенциальное использование липосом будет изучено в последующем исследовании.
|
|
|
|
Кроме того, золото также позволяет свести к минимуму цитотоксический эффект никелевого покрытия — ведь если в будущем микророботы будут работать на живых животных или людях, их необходимо сделать биосовместимыми и нетоксичными, что является частью текущих исследований. В настоящем исследовании исследователи использовали никель в качестве магнитной среды и простой постоянный магнит, чтобы тянуть роботов. В последующих исследованиях они хотят протестировать оптоакустическую визуализацию с помощью более сложных манипуляций с использованием вращающихся магнитных полей. «Это дало бы нам возможность точно контролировать и перемещать микророботов даже в сильно текущей крови», — говорит Метин Ситти. «В настоящем исследовании мы сосредоточились на визуализации микророботов. Проект был чрезвычайно успешным благодаря отличной совместной среде в CLS, которая позволила объединить опыт двух исследовательских групп в MPI-IS в Штутгарте для роботизированной части и ETH Zurich для визуальная часть», — заключает Ситти.
|
|
|
|
Источник
|







