|
Показали серийный костюм со встроенным экзоскелетом
|
|
|
|
Коммерциализация носимых роботов швейного типа сделала значительный шаг вперед благодаря разработке оборудования, которое может непрерывно и автоматически сплетать ультратонкие нити из сплава с памятью формы - тоньше человеческого волоса - в легкие и гибкие “тканевые мышцы”, пригодные для крупномасштабного производства.
|
|
|
|
Исследовательский центр передовой робототехники Корейского института машиностроения и материалов (КИММ, президент Сон Хен Рю) при Национальном исследовательском совете по науке и технологиям (NST, председатель Ен Сик Ким) под руководством главного научного сотрудника Парка Чхоль Хун разработал автоматизированную систему ткачества, которая позволяет непрерывно массовое производство тканевых мышц - легких, но мощных искусственных мышечных приводов.
|
|
|
|
В недавно разработанной системе используется проволока из сплава с памятью формы (SMA) диаметром 25 мкм, что составляет примерно четверть толщины человеческого волоса, которая перерабатывается в спиралевидную нить, позволяющую непрерывно переплетать мышцы ткани. Эта ткань, весящая всего 10 г, может поднимать 10-15 кг, что делает ее идеальным приводным механизмом для носимых роботов швейного типа. В катушечной нити SMA, ранее разработанной компанией KIMM, использовалась металлическая проволока с сердечником, что обеспечивало низкое удлинение и затрудняло автоматическое плетение. Чтобы преодолеть это ограничение, исследовательская группа KIMM заменила металлическую сердцевину на натуральное волокно, переработала структуру и процесс изготовления ткани muscle, а также усовершенствовала конструкцию ткацкого станка, тем самым обеспечив стабильное и непрерывное массовое производство.
|
|
|
|
|
|
|
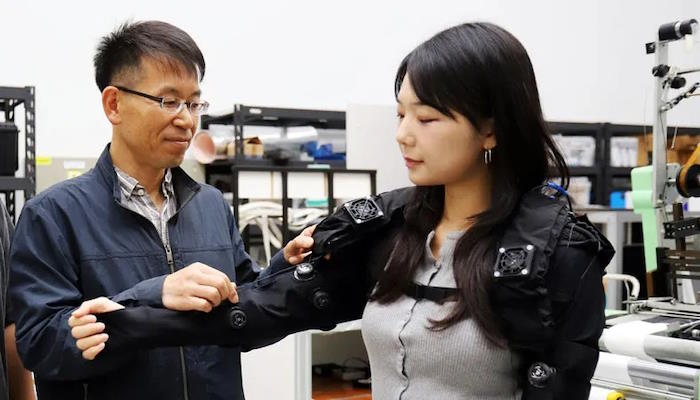
Обычные носимые роботы, предназначенные для поддержки нескольких суставов, таких как локтевой, плечевой и поясничный, опирались на тяжелые, шумные двигатели или пневматические приводы, что делало их громоздкими, дорогими и неудобными при длительном использовании. В результате большинство из них могли оказывать лишь ограниченную поддержку конкретным суставам. Активная поддержка плечевого сустава была особенно сложной задачей из-за его сложного диапазона движений. В отличие от этого, тканевые мышечные приводы KIMM отличаются малым весом и гибкостью, что позволяет им естественным образом приспосабливаться к нескольким сложным суставам и активно помогать им одновременно. Используя эту технологию, исследовательская группа разработала первого в мире робота-носителя типа одежды весом менее 2 кг, который одновременно поддерживает локоть, плечо и талию, сокращая мышечные усилия более чем на 40% при выполнении повторяющихся физических задач.
|
|
|
|
Кроме того, команда создала сверхлегкий плечевой робот-ассистент весом всего 840 г, который пациенты с мышечной слабостью могут с комфортом носить в повседневной жизни. В ходе клинических испытаний, проведенных в больнице Сеульского национального университета (SNUH) на пациентах с мышечной слабостью, в том числе с мышечной дистрофией Дюшенна, носимый плечевой робот-ассистент увеличил диапазон движений плеч более чем на 57%.
|
|
|
|
Имея возможность непрерывно производить высококачественную однородную ткань с помощью автоматизированной ткацкой системы, исследовательская группа заложила основу для коммерциализации носимых роботов для одежды.
|
|
|
|
Ожидается, что этот прорыв снизит физическую нагрузку на работников, улучшит качество жизни пациентов и ускорит широкое внедрение носимых роботов, тем самым повысив конкурентоспособность промышленности. В частности, робот-ассистент, предназначенный для поддержки реабилитации и повседневной деятельности пациентов с мышечной слабостью, как ожидается, снизит нагрузку на лиц, осуществляющих уход, одновременно улучшая независимость пациентов, качество их жизни, самооценку и общее самочувствие.
|
|
|
|
“Наша разработка технологии непрерывного массового производства мышечной ткани — ключевого компонента носимых роботов для одежды - значительно улучшит качество жизни в таких областях, как здравоохранение, логистика и строительство”, — сказал доктор Чол Хун Парк, главный научный сотрудник исследовательского центра передовой робототехники KIMM. - Мы продолжим развивать обширные технологии носимой робототехники KIMM, чтобы ускорить коммерциализацию и занять лидирующие позиции на мировом рынке носимой робототехники”.
|
|
|
|
Это исследование, получившее награду KIMM за лучшее исследование 2024 года, было поддержано программой ACE KIMM, Основной программой развития робототехники Министерства торговли, промышленности и ресурсов (MOTIR) и проектом Ли Кун Хи по детскому раку и редким заболеваниям Сеульской национальной университетской больницы (SNUH). Результаты исследования были опубликованы онлайн в октябрьском выпуске журнала TNSRE (IEEE Transactions on Neural Systems and Rehabilitation Engineering), ведущего международного журнала в области реабилитационной инженерии, за 2025 год.
|
|
|
|
Источник
|







