|
Автономный полет стаи дроидов
|
|
|
|
В рамках нашей сети бионического обучения мы более 15 лет исследуем чудо полета. За это время мы исследовали множество летающих объектов и их естественные принципы, изучая эти биологические модели, чтобы создать на их основе нашу собственную технологию. Автономное поведение роя по-прежнему представляло для нас серьезную проблему. Бионическая пчела - это первый летающий объект, разработанный командой, который может летать полностью автономно в больших количествах и в составе роя. При весе около 34 граммов, длине 22 сантиметра и размахе крыльев 24 сантиметра BionicBee является самым маленьким летающим объектом из сети Bionic Learning Network на сегодняшний день. Это первый случай, когда разработчики использовали метод генеративного проектирования: после ввода нескольких параметров программное обеспечение находит оптимальную структуру, основанную на определенных принципах проектирования, чтобы использовать как можно меньше материала, необходимого для создания максимально стабильного дизайна. Эта стабильно легкая конструкция имеет решающее значение для хорошей маневренности и продолжительности полета.
|
|
|
|
Корпус пчелы образует компактный корпус для механизма биения крыльев, коммуникационной технологии, а также компонентов управления биением крыльев и адаптацией геометрии крыльев. Бесщеточный двигатель, три серводвигателя, аккумулятор, редуктор и различные печатные платы установлены в самых труднодоступных местах. Интеллектуальное взаимодействие между двигателями и механикой позволяет, например, точно регулировать частоту взмахов крыльев для выполнения различных маневров. Искусственная пчела летает с частотой взмахов крыльев от 15 до 20 Герц. Крылья двигаются вперед-назад под углом 180 градусов. Бесщеточный двигатель управляет взмахами крыльев без люфта благодаря точно управляемой сверхлегкой механической конструкции. Чем выше скорость, тем выше частота взмахов крыла и подъемная сила. Три серводвигателя в основании крыла изменяют геометрию крыла определенным образом, тем самым повышая эффективность определенных положений крыла и создавая определенное изменение подъемной силы.
|
|
|
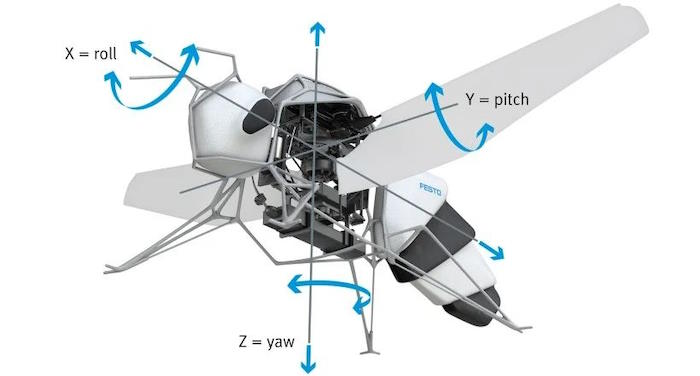
Если предполагается, что пчела летит вперед, геометрия регулируется таким образом, чтобы подъемная сила в положении заднего крыла была больше, чем в переднем. Это приводит к наклону корпуса вперед (тангажу), и пчела летит вперед. Если геометрия настроена таким образом, что правое крыло создает большую подъемную силу, чем левое, пчела поворачивается вокруг продольной оси влево и отлетает в сторону. Другой вариант - отрегулировать его таким образом, чтобы одно крыло создавало большую подъемную силу спереди, а второе - сзади. Это заставляет пчелу поворачиваться (рыскать) вокруг вертикальной оси. Автономное поведение десяти пчел становится возможным благодаря системе локализации внутри помещения с использованием сверхширокополосной технологии (СШП). Восемь креплений СШП установлены на двух уровнях помещения. Это означает, что время работы может быть точно измерено, и пчелы могут позиционировать себя в пространстве. СШП-якоря посылают сигналы отдельным пчелам, которые независимо измеряют расстояния до передатчиков и могут рассчитать свое собственное положение в пространстве, используя временные метки.
|
|
|
|
Чтобы летать в рое, пчелы следуют по траекториям, заданным центральным компьютером. Для безопасного и бесконфликтного полета в сомкнутом строю требуется высокая пространственная и временная точность. При планировании маршрута также необходимо учитывать возможное взаимное воздействие, вызванное воздушной турбулентностью ("нисходящий поток"). Поскольку каждая пчела изготавливается вручную, даже малейшие производственные отличия могут повлиять на поведение в полете. Именно поэтому пчелы также оснащены функцией автоматической калибровки, так что после короткого испытательного полета каждая пчела определяет свои собственные оптимизированные параметры контроллера. Именно так интеллектуальный алгоритм может определить различия в оборудовании между отдельными пчелами. А это, в свою очередь, позволяет управлять всем роем извне, как если бы все пчелы были идентичны. При разработке BionicBee разработчики воспользовались многочисленными знаниями, полученными в ходе предыдущих проектов. Это следующий в серии бионических летающих объектов, которые были созданы в рамках нашей сети Bionic Learning Network. Более 15 лет мы разрабатываем исследовательские платформы, используя общие технические принципы, основанные на природе. Перейдите по ссылкам ниже, чтобы ознакомиться с ними.
|
|
|
|
Источник
|







